项目陷入了瓶颈期
具体体现在如下方面:
**1. 大概有300块钱的东西被烧了(一个stm32和一个驱动板)
- 控制思路不清晰,小车定位有点问题。**
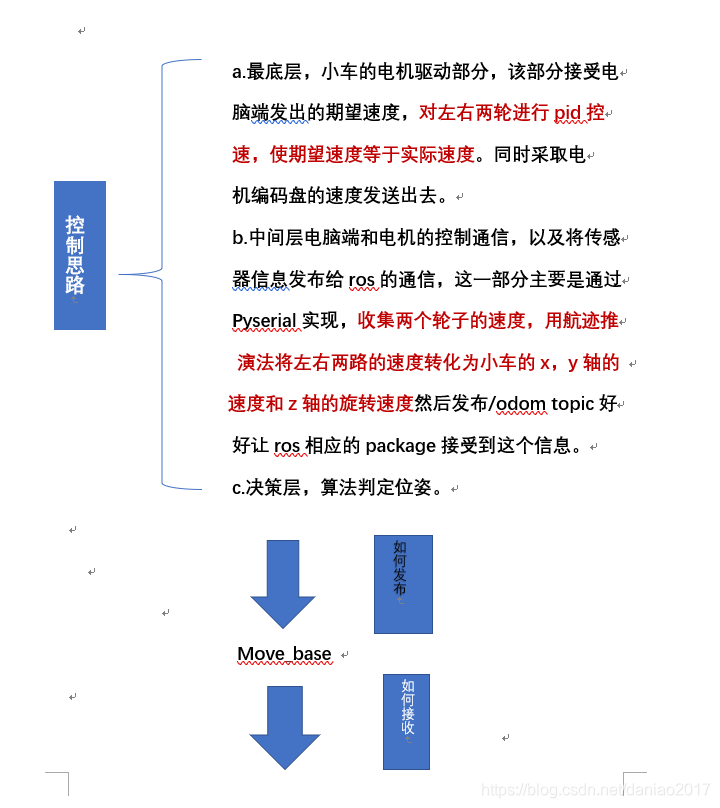
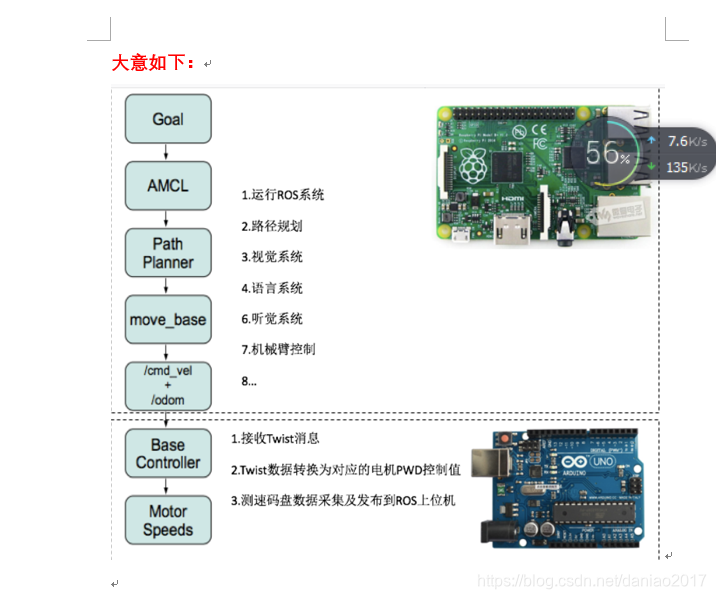
控制思路:
小车定位:
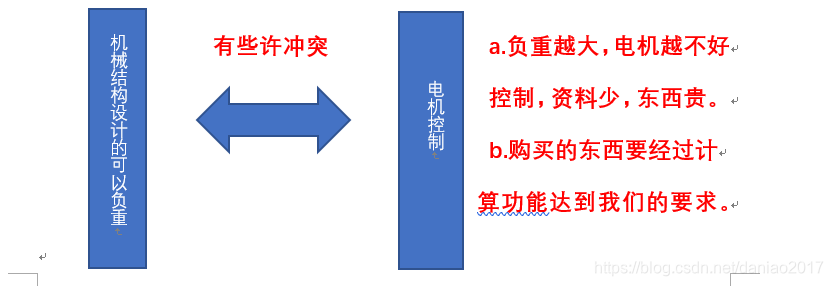
以完成申请书上的东西为主,可以负重一点点,但重点不是落在负重上。而是小车的机械结构与控制上。
一些问题:
a.电机的选型出了问题,100w/2500转,导致转矩为0.4n*m,不能承重?解决方法?1.增加减速机构,以增大转矩。 2.换电机,底层机械设计重新改进 个人偏向第二种解决方法:第一种方案可以保留,如果有人想继续做下去的话,思路是增加减速结构,选一个好一点的驱动器(2个500以上?),能读出转速发送给单片机的那种,然后整合到小车上。
b.时间,时间,时间,这个项目很有挑战性,花的时间有点多,需要克服一下。而且马上就期末了,我不可能揽下所有事情,所以会有分工。c. 干活毅力很重要,现在出现的一些问题都是小问题,不要乱了阵脚。
d. 小车的一些性能指标:
- 最大线速度1m/s
- 转矩6n*m以上,可能还要计算一下
- 预期称重30kg
e 购买东西:预算3000左右,等上海市那边的钱批下来,先看。 电池:500 树莓派:300-400 // 32g内存,3b(3b+) 直流无刷减速电机2 300 //AB相编码器 Stm32:200 机械结构 500 Arduino:200-250 //uno mege2560 Kinetic 300(不知道有发票吗) Imu 200 语言识别模块 200 硬盘2 100


